
Berbeda dengan metode resistansi, metode tegangan melibatkan perubahan tegangan penggerak selama fase kontrol untuk mengontrol kelebihan tegangan dan arus. Ada sekitar dua metode untuk mengubah tegangan penggerak . Salah satunya adalah untuk mencapai perubahan dengan membagi tegangan penggerak melalui resistor, dan yang lainnya adalah dengan mengubah sinyal keluaran dalam chip kontrol (DSPFPGA), dan kemudian mengubahnya menjadi sinyal analog melalui chip D/A untuk mengubah penggerak. tegangan. Diagram skema kontrol proses untuk metode penyalaan tegangan ditunjukkan pada Gambar 2, dan bentuk gelombang eksperimental ditunjukkan pada Gambar

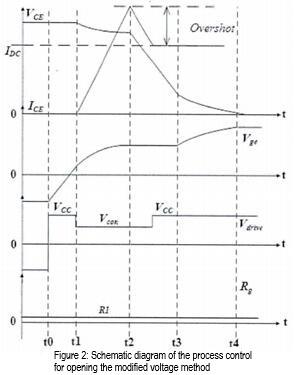
Cara pengendalian proses pembukaan metode tegangan dan metode hambatan pada dasarnya sama. Tahap kendalinya sama, dimulai dari kebangkitan ICE dan diakhiri dengan arus pemulihan balik dioda balik transistor atas.
Namun, metode tegangannya adalah dengan mengubah resistor penggerak.
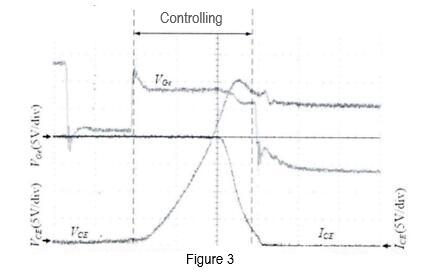
Diagram skema kontrol proses penghentian metode tegangan ditunjukkan pada Gambar 4, dan bentuk gelombang eksperimental ditunjukkan pada Gambar 3.
Gambar 3: Bentuk gelombang eksperimental dari proses switching menggunakan metode tegangan yang dimodifikasi (drive switching dari -10V ke 2.5V)
Gambar 4 Diagram skema pengendalian proses penghentian metode tegangan
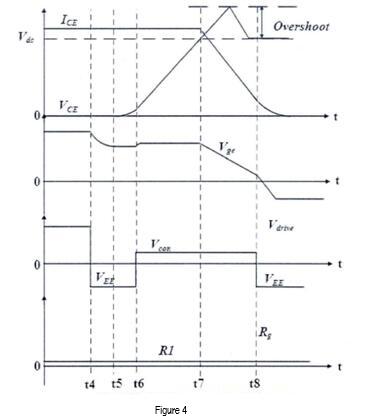
Sama seperti metode resistansi, metode tegangan juga dikontrol mulai dari kenaikan VCE selama proses shutdown hingga ICE turun mendekati nol dan mengakhiri pengendalian.
Keuntungan mengubah metode tegangan menjadi penggerak multi-tahap telah dibahas secara rinci sebelumnya, dan kerugiannya serupa dengan mengubah metode resistansi. Di bawah ini adalah kekurangannya:
1: Ada dua metode yang ada untuk mengubah tegangan penggerak selama fase kontrol: pertama adalah mengubah tegangan penggerak dengan mengalihkan resistor pembagi tegangan melalui sakelar (MOSFET); Metode lainnya adalah dengan mengubah tegangan penggerak melalui chip D/A. Yang pertama memiliki masalah yang sama dengan metode kontrol tegangan, yaitu sulit untuk mengisolasi sinyal sakelar kontrol dari rangkaian daya dan sinyal mudah terpengaruh oleh derau rangkaian daya. Yang terakhir ini memiliki masalah dalam meningkatkan biaya dan kompleksitas rangkaian chip D/A, sekaligus meningkatkan penundaan rangkaian kontrol dan
mempengaruhi kontrol umpan balik.
Poin kedua adalah kontrol umpan balik selama proses aktivasi sulit dicapai, seperti halnya mengubah metode resistansi, kontrol harus dimulai dari saat ICE mulai naik. Jika tidak, akan ada dua situasi: 1. Jika tegangan penggerak tinggi, seperti halnya mengubah metode resistansi, overshoot ICE akan lebih tinggi. Jika tegangan penggerak rendah maka akan menyebabkan penurunan ICE bahkan menyebabkan IGBT mati secara tidak sengaja. Analisis alasan spesifik:
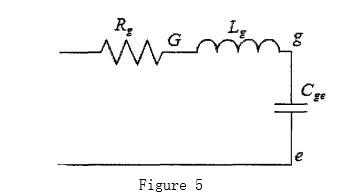
Model ekuivalen rangkaian penggerak IGBT pada tahap ini sama dengan model ekuivalen dalam menganalisis kekurangan metode resistansi yang dimodifikasi, seperti yang ditunjukkan pada Gambar 2.20. Karena ukuran Rg yang kecil, Ig jauh lebih besar
daripada IgC. Oleh karena itu, ketika menganalisis cacat pada metode tegangan modifikasi, pengaruh IgC dapat diabaikan. Ini menyederhanakan model yang setara dan hanya membutuhkan sirkuit penggerak. Karena Rg yang kecil, maka perlu diperhatikan
adanya induktansi parasit Lg pada rangkaian penggerak. Model yang disederhanakan ditunjukkan pada Gambar 5.
Gambar 5 Model yang disederhanakan untuk tahap kontrol proses pembukaan metode tegangan
Jika tegangan penggerak selama pengendalian tinggi, maka diperlukan waktu (kira-kira puluhan ns) agar Ig turun karena adanya induktansi parasit Lg pada rangkaian penggerak. Pada tahap ini, Vge masih akan naik dengan kecepatan yang lebih cepat, sehingga tidak mungkin untuk mengurangi overshoot ICE menjadi sangat rendah. Jika Anda ingin mengontrol overshoot ICE sangat rendah, Anda perlu mengurangi tegangan penggerak sangat rendah, bahkan lebih rendah dari Vge arus. Hal ini akan menyebabkan ICE terjatuh, dan bahkan menyebabkan false shutdown, yang akan mempengaruhi pengoperasian normal IGBT. Agar IGBT bekerja secara normal, tegangan penggerak selama fase kontrol harus setidaknya lebih besar dari Vge sebelum kontrol, yang akan mencegah penurunan overshoot ICE ke level yang lebih rendah. Oleh karena itu, margin arus IGBT yang besar masih perlu dibiarkan dalam desain sirkuit.
Poin ketiga adalah sulitnya mengubah tegangan penggerak Vcom selama fase kontrol, dan efek kontrol yang berbeda (overshoot tegangan dan arus yang berbeda) tidak dapat dicapai. Beberapa literatur mengusulkan metode penambahan chip D/A ke rangkaian kontrol digital untuk mengubah Vcom. Namun, hal ini tidak hanya meningkatkan biaya, tetapi juga meningkatkan penundaan putaran kendali, yang dapat menyebabkan pengendalian tidak akurat atau bahkan tidak efektif. Ini tidak dapat dianggap sebagai metode yang baik dan tidak dapat digunakan dalam penerapan praktis.
Kategori
terkini postingan








Pindai ke wechat:everexceed















